








The fastest swimming soft robot in history was inspired by a manta ray.
An American research team has taken inspiration from iconic sea creatures to improve the ability to control a robot's movement underwater, breaking its own speed record.
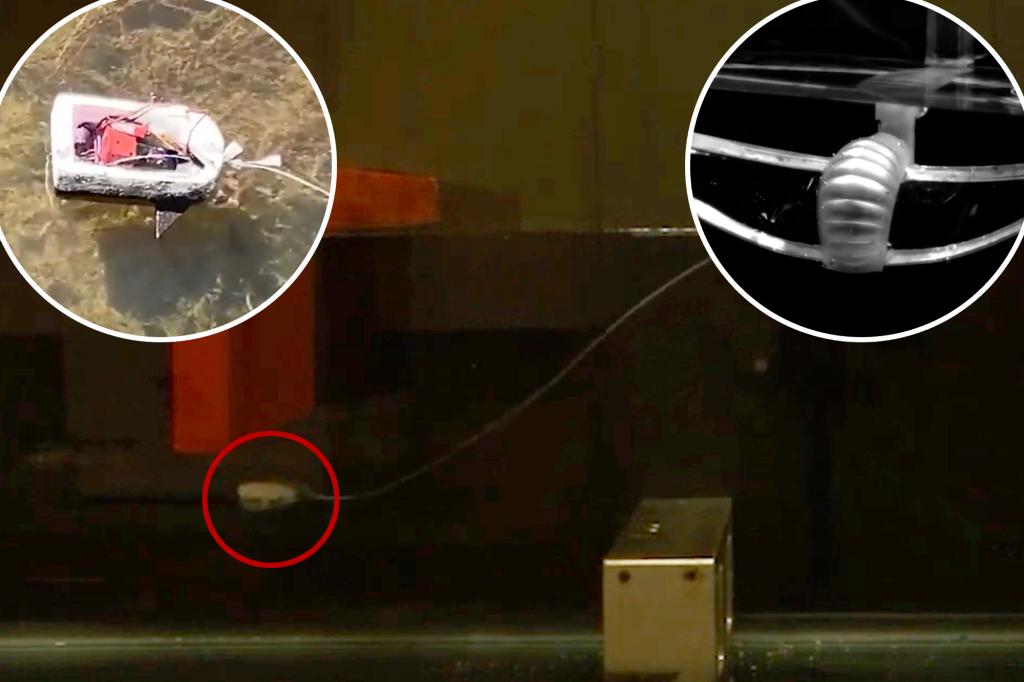
record breaking robot It has a fin shaped like a manta ray. We use a material that is stable when the fins are expanded.
Professor Jie Ying of North Carolina State University, corresponding author of the study, said: “Two years ago, we demonstrated an aquatic soft robot that can reach an average speed of 3.74 body lengths per second.
“We have improved its design. Our new soft robot is energy efficient and reaches a speed of 6.8 body lengths per second,” Yin continued.
“Additionally, previous models could only swim at the surface,” he said. “Our new robot can swim up and down the water column.”
He explained that the robot's fins are attached to a flexible silicone body that contains a chamber into which air can be pumped.
Inflating the air chamber forces the fin to bend. This is similar to the downstroke when a manta ray flaps its fins.
Once the air is removed from the chamber, the fins will naturally return to their original position.
Dr. Haitao Qing, lead author of the study and student at North Carolina State University, said: “When you pump air into the chamber, you introduce energy into the system.
“The fin tries to return to a stable state, so releasing the air also releases the energy within the fin,” Chin explained.
“This means the robot only needs one actuator, allowing for faster actuation.”
Achievements of the research team Published in Science Advances magazineHe said research into manta ray fluid dynamics also played an important role in controlling the robot's vertical movement.
Study co-author Dr. Jiacheng Guo, a University of Virginia student, said: “We observed the swimming movements of manta rays and were able to mimic that behavior in order to control whether the robot swims toward the surface, swims down, or maintains its position within the water column. It was done.”
“When a manta ray swims, it generates two streams of water that propel it forward. [and] Change your trajectory by changing your swimming movements.
“We adopted a similar technique to control the vertical movement of this swimming robot,” Guo continued.
“We are developing technology that allows fine control of lateral movement.”
“We are excited to be able to demonstrate that this is the first step in the study,” said Yuanhan Zhu, Ph.D., co-author of the study and assistant professor of mechanical engineering at the University of California, Riverside.
“When the robot flaps its fins rapidly, it rises upwards.
“But slowing down the operating frequency allows the robot to sink slightly while flapping its fins, allowing it to dive below or swim at the same depth.”
Qing added: “Another factor is that we are supplying this robot with compressed air.
“This is important because when the robot's fins are stationary, the air chamber is empty and the robot's buoyancy is reduced. And when the robot is slowly flapping its fins, the fins are It is stationary more often,” Qing continued.
“In other words, the faster the robot flaps its fins, the more time the air chambers have to fill and the more buoyant it becomes.”
The research team demonstrated the soft robot's capabilities in two different ways.
One iteration of the robot allowed it to navigate a course of obstacles placed on the surface and floor of the aquarium.
The researchers also showed that untethered robots can deliver payloads to the surface, including air and power sources.
“Although this is highly engineered, the basic concept is very simple, and with just one actuation input, our robot can navigate complex vertical environments.” said Jie Ying, associate professor of aerospace engineering.
“We are currently working on improving lateral motion and exploring other modes of operation that would significantly enhance the functionality of this system.
“Our goal is to achieve this with a design that maintains elegant simplicity.”







